Improving Performance¶
Overview¶
This section covers the main strategies for making spinterp faster:
- Vectorising the objective function
- Reusing previously computed results
- Purging redundant interpolant data
- Vectorised interpolant evaluation
Vectorising the objective function¶
Vectorisation is most beneficial when function evaluations are cheap (\(\lesssim 10^{-2}\) s each). Consider the function
A non-vectorised implementation evaluates one point at a time:
def f(x1, x2):
return (x1 * x2) ** 2
A vectorised implementation processes a whole array in one call:
import numpy as np
def f_vec(x1, x2):
return (x1 * x2) ** 2 # NumPy broadcasts automatically
When passing a vectorised function, the grid points are delivered as full arrays, avoiding per-point Python call overhead. For cheap functions, this can give a 2× or better speed-up when computing surpluses.
Reusing previous results¶
The hierarchical surplus structure means that a higher-level interpolant is a strict extension of a lower-level one. You never need to recompute previously computed levels.
The recommended pattern is to build the interpolant in a loop, checking the estimated error after each level:
import numpy as np
import spinterp
def f_vec(x1, x2):
return (x1 * x2) ** 2
d, n_max = 2, 8
all_seq, all_surp = [], []
est_err = np.inf
for k in range(n_max + 1):
nl = spinterp.spnlevels(k, d)
seq = spinterp.spgetseq(k, d, nl)
tp = spinterp.spdim_cc(seq)
x_k = spinterp.spgrid_cc(seq, tp)
fvals = np.array([f_vec(*x_k[i]) for i in range(tp)])
if k == 0:
surp = fvals.copy()
else:
z_prev = np.concatenate(all_surp)
seq_prev = np.vstack(all_seq)
surp = fvals - spinterp.spcmpvals_cc(z_prev, x_k, seq, seq_prev)
all_seq.append(seq)
all_surp.append(surp)
# Estimated error = max |surplus| / (max |f| + eps)
est_err = np.max(np.abs(surp)) / (np.max(np.abs(fvals)) + 1e-14)
print(f"level {k}: {tp} new pts, est. rel. error = {est_err:.3e}")
if est_err < 1e-4:
break
Example output for a smooth function:
level 0: 1 new pts, est. rel. error = 1.000e+00
level 1: 4 new pts, est. rel. error = 3.750e-01
level 2: 8 new pts, est. rel. error = 4.688e-02
level 3: 16 new pts, est. rel. error = 2.930e-03
level 4: 28 new pts, est. rel. error = 8.545e-05
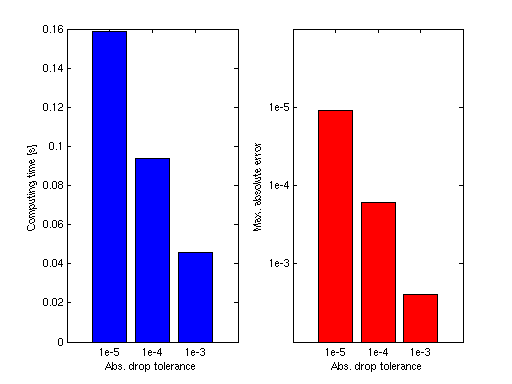
Purging interpolant data¶
After the interpolant is built, subgrids whose hierarchical surpluses are all below a
drop tolerance can be excluded from evaluation without significantly affecting accuracy.
This is the sppurge concept from the original MATLAB toolbox.
A simple Python equivalent: keep only subgrids where \(|\alpha_{\mathbf{l}}|_\infty\) exceeds a threshold:
import numpy as np
import spinterp
d = 2
max_level = 6
def f(x, y):
return np.sin(x) + np.cos(y)
# Build hierarchical surpluses (Clenshaw-Curtis grid)
all_seq, all_surp = [], []
for k in range(max_level + 1):
nl = spinterp.spnlevels(k, d)
seq = spinterp.spgetseq(k, d, nl)
tp = spinterp.spdim_cc(seq)
x_k = spinterp.spgrid_cc(seq, tp)
fvals = np.array([f(*x_k[i]) for i in range(tp)])
if k == 0:
surp_k = fvals.copy()
else:
z_prev = np.concatenate(all_surp)
seq_prev = np.vstack(all_seq)
surp_k = fvals - spinterp.spcmpvals_cc(z_prev, x_k, seq, seq_prev)
all_seq.append(seq)
all_surp.append(surp_k)
# Purge subgrids whose surpluses are all below the drop tolerance
drop_tol = 1e-5
keep = [
(s, surp)
for s, surp in zip(all_seq, all_surp)
if np.max(np.abs(surp)) > drop_tol
]
seq_pruned = np.vstack([s for s, _ in keep])
z_pruned = np.concatenate([surp for _, surp in keep])
print(f"Original subgrids: {len(all_seq)}, after purge: {len(keep)}")
print(f"Original surpluses: {sum(len(s) for s in all_surp)}, after purge: {len(z_pruned)}")
The trade-off: smaller drop_tol → higher accuracy, slower evaluation. Typical savings
are 2–5× speedup at the cost of \(\sim 10^{-4}\) relative accuracy degradation when
drop_tol = 1e-5.
Vectorised interpolant evaluation¶
The spinterp_cc (and related) functions are designed for batch evaluation: passing
all query points as a single 2-D array is far more efficient than one-point-at-a-time
calls.
import numpy as np
import spinterp
d = 2
max_level = 4
def f(x, y):
return np.sin(x) + np.cos(y)
# Build hierarchical surpluses (Clenshaw-Curtis grid)
all_seq, all_surp = [], []
for k in range(max_level + 1):
nl = spinterp.spnlevels(k, d)
seq = spinterp.spgetseq(k, d, nl)
tp = spinterp.spdim_cc(seq)
x_k = spinterp.spgrid_cc(seq, tp)
fvals = np.array([f(*x_k[i]) for i in range(tp)])
if k == 0:
surp_k = fvals.copy()
else:
z_prev = np.concatenate(all_surp)
seq_prev = np.vstack(all_seq)
surp_k = fvals - spinterp.spcmpvals_cc(z_prev, x_k, seq, seq_prev)
all_seq.append(seq)
all_surp.append(surp_k)
z = np.concatenate(all_surp)
seq = np.vstack(all_seq)
rng = np.random.default_rng(0)
pts = rng.random((1000, d))
# Slow — Python loop over 1000 points
results_slow = [spinterp.spinterp_cc(z, pts[i:i+1], seq)[0] for i in range(1000)]
# Fast — single batched call
results_fast = spinterp.spinterp_cc(z, pts, seq) # pts.shape = (1000, d)
print(f"Max diff slow vs fast: {np.max(np.abs(np.array(results_slow) - results_fast)):.2e}")
Typical speed-up: 50–100× for 1000 points, due to reduced Python overhead and better cache utilisation in the Fortran kernel.
Summary of tips¶
| Tip | When to apply | Typical benefit |
|---|---|---|
| Vectorise the objective function | Cheap functions (\(< 10^{-2}\) s/eval) | 2–10× faster spcmpvals |
| Build levels incrementally | Always | Avoids recomputing surpluses |
| Purge small-surplus subgrids | After convergence, if evaluation speed matters | 2–5× faster spinterp |
| Batch query points | Always | 50–100× faster spinterp |
| Use sparse index format | \(d > 10\) | Lower memory, faster iteration |