Computing Derivatives¶
One primary purpose of sparse grid interpolation is constructing surrogate functions for
local or global optimisation. spinterp computes exact derivatives of the interpolant —
not finite-difference approximations — at almost no additional memory cost.
How to obtain derivatives¶
Call spderiv_cc (or spderiv_cb for the Chebyshev grid) instead of spinterp_cc. The
function returns both the interpolated values and the full gradient vector:
import numpy as np
import spinterp
d = 2
def f(x, y):
return np.sin(x) + np.cos(y)
# Build hierarchical surpluses (Clenshaw-Curtis grid)
all_seq, all_surp = [], []
for k in range(5):
nl = spinterp.spnlevels(k, d)
seq = spinterp.spgetseq(k, d, nl)
tp = spinterp.spdim_cc(seq)
x_k = spinterp.spgrid_cc(seq, tp)
fvals = np.array([f(*x_k[i]) for i in range(tp)])
if k == 0:
surp_k = fvals.copy()
else:
z_prev = np.concatenate(all_surp)
seq_prev = np.vstack(all_seq)
surp_k = fvals - spinterp.spcmpvals_cc(z_prev, x_k, seq, seq_prev)
all_seq.append(seq)
all_surp.append(surp_k)
z = np.concatenate(all_surp)
seq = np.vstack(all_seq)
pts_unit = np.array([[0.25, 0.4], [0.6, 0.75], [0.1, 0.9]])
# ip.shape = (npoints,)
# grad.shape = (npoints, d)
ip, grad = spinterp.spderiv_cc(z, pts_unit, seq)
print("Values: ", ip)
print("df/dx1: ", grad[:, 0])
print("df/dx2: ", grad[:, 1])
The procedure for building the surpluses z and level-index matrix seq is identical
regardless of whether derivatives are needed.
Note
The computed derivatives are the exact derivatives of the interpolant (up to floating-point accuracy), not approximations of the derivatives of the original function \(f\). No additional memory is required.
Derivatives of piecewise multilinear interpolants¶
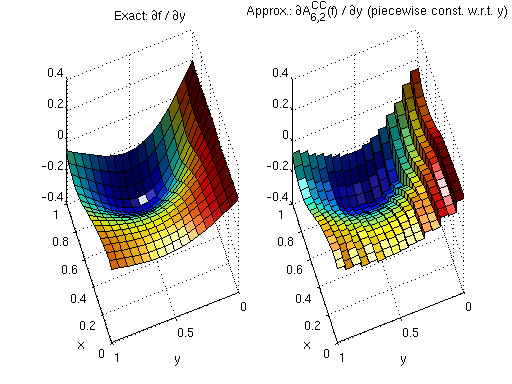
Differentiating a piecewise linear function yields a piecewise constant function. The derivatives are exact everywhere except at the kinks (the grid nodes), where only a one-sided derivative exists.
Example — 2-D function¶
Consider the test function
with exact partial derivatives
The figure below compares \(\partial f / \partial y\) (left, exact) with the sparse grid derivative \(\partial A^{\text{CC}}_{6,2}(f) / \partial y\) (right, piecewise constant with visible jumps at level-4 grid nodes):
Augmented continuous derivatives¶
Discontinuous derivatives make first-order optimality conditions \(\nabla f = \mathbf{0}\) impossible to satisfy exactly, leading to slow convergence in gradient-based optimisation.
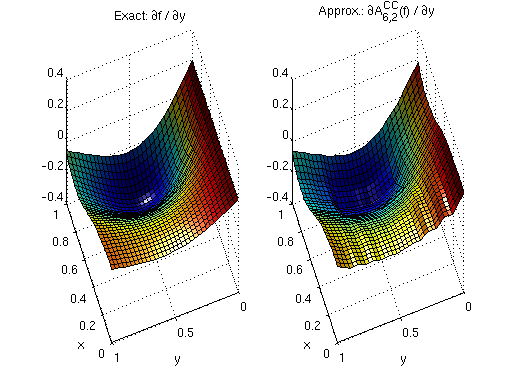
The continuous derivative option linearly interpolates the piecewise-constant derivative between two augmented evaluation points \(y_1\) and \(y_2\) on either side of each grid cell:
where \(\Delta\) is the cell width \(1/2^{\ell_{\max}}\).
Use spcont_deriv_cc followed by pp_deriv to obtain continuous derivatives:
import numpy as np
import spinterp
d = 2
def f(x, y):
return np.sin(x) + np.cos(y)
# Build hierarchical surpluses (Clenshaw-Curtis grid)
all_seq, all_surp = [], []
for k in range(5):
nl = spinterp.spnlevels(k, d)
seq = spinterp.spgetseq(k, d, nl)
tp = spinterp.spdim_cc(seq)
x_k = spinterp.spgrid_cc(seq, tp)
fvals = np.array([f(*x_k[i]) for i in range(tp)])
if k == 0:
surp_k = fvals.copy()
else:
z_prev = np.concatenate(all_surp)
seq_prev = np.vstack(all_seq)
surp_k = fvals - spinterp.spcmpvals_cc(z_prev, x_k, seq, seq_prev)
all_seq.append(seq)
all_surp.append(surp_k)
z = np.concatenate(all_surp)
seq = np.vstack(all_seq)
pts_unit = np.array([[0.25, 0.4], [0.6, 0.75], [0.1, 0.9]])
maxlev = int(seq.max())
maxlevvec = np.full(d, maxlev, dtype=np.int32)
ip, ipder, ipder2 = spinterp.spcont_deriv_cc(z, pts_unit, seq, maxlev)
# pp_deriv post-processes ipder in-place using ipder2
spinterp.pp_deriv(
np.asfortranarray(ipder),
np.asfortranarray(ipder2),
maxlevvec,
np.asfortranarray(pts_unit),
)
print("Values: ", ip)
print("df/dx1: ", ipder[:, 0])
print("df/dx2: ", ipder[:, 1])
The figure below shows the same derivative after the continuity post-processing:
Derivatives of polynomial interpolants¶
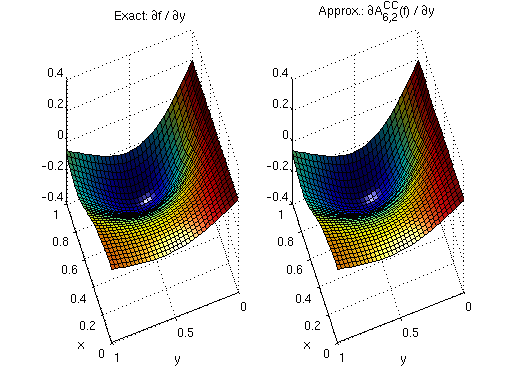
For the Chebyshev-Gauss-Lobatto grid, the basis functions are globally smooth polynomials.
The derivatives are computed via the discrete cosine transform (DCT), using the
spderiv_cb function:
import numpy as np
import spinterp
d = 2
def f(x, y):
return np.sin(x) + np.cos(y)
# Build hierarchical surpluses (Chebyshev grid)
# CB uses the same point count as CC
all_seq, all_surp = [], []
for k in range(5):
nl = spinterp.spnlevels(k, d)
seq = spinterp.spgetseq(k, d, nl)
tp = spinterp.spdim_cc(seq)
x_k = spinterp.spgrid_cb(seq, tp)
fvals = np.array([f(*x_k[i]) for i in range(tp)])
if k == 0:
surp_k = fvals.copy()
else:
z_prev = np.concatenate(all_surp)
seq_prev = np.vstack(all_seq)
surp_k = fvals - spinterp.spcmpvals_cb(z_prev, x_k, seq, seq_prev)
all_seq.append(seq)
all_surp.append(surp_k)
z_cb = np.concatenate(all_surp)
seq = np.vstack(all_seq)
pts_unit = np.array([[0.25, 0.4], [0.6, 0.75], [0.1, 0.9]])
ip, grad = spinterp.spderiv_cb(z_cb, pts_unit, seq)
print("Values: ", ip)
print("df/dx1: ", grad[:, 0])
print("df/dx2: ", grad[:, 1])
The resulting derivatives are infinitely smooth:
Approximation quality¶
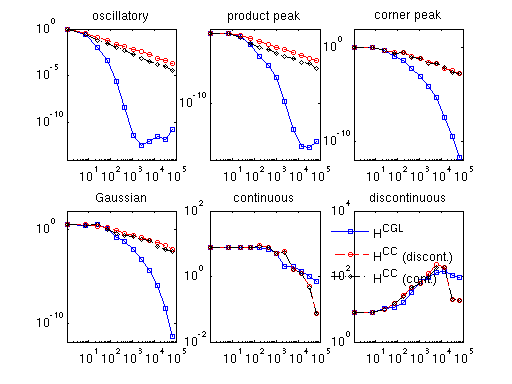
The figure below shows the maximum absolute error of the derivatives for six standard Genz test functions at 100 randomly sampled points for dimension \(d = 3\):
- H\(^\text{CC}\) — piecewise constant, Clenshaw-Curtis grid
- H\(^\text{CC}\) (cont.) — augmented continuous, Clenshaw-Curtis grid
- H\(^\text{CGL}\) — smooth polynomial, Chebyshev grid
Note
Functions with kinks (labelled continuous and discontinuous) cannot have their derivatives approximated in the maximum norm: convergence fails near the kinks. The error decreases in the plot only because the randomly sampled points are less likely to land near the (shrinking) non-convergent region.
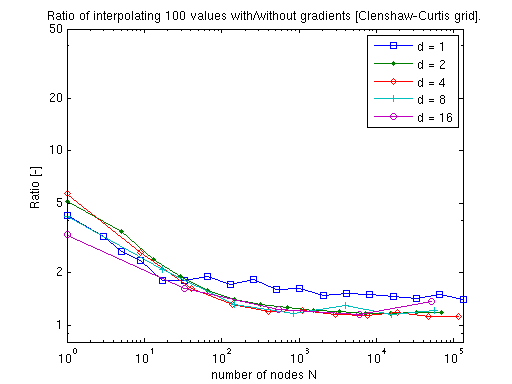
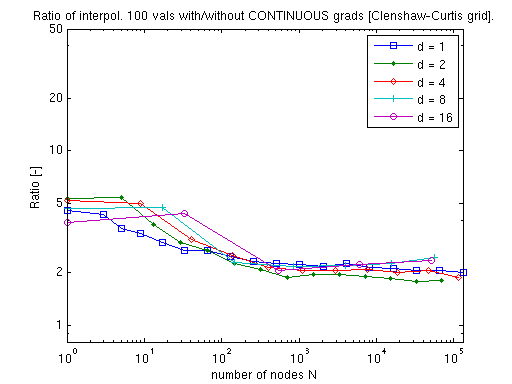
Computational cost¶
Clenshaw-Curtis¶
Computing the exact or augmented continuous gradient adds only a small, dimension-independent factor over plain interpolation:
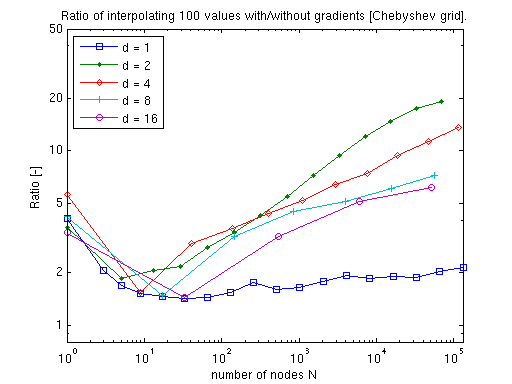
Chebyshev¶
The polynomial case requires more sophisticated algorithms. However, as the dimension increases, fewer subgrids need differentiation (lower-dimensional subgrids omit the dimensions they do not span), so the overhead decreases:
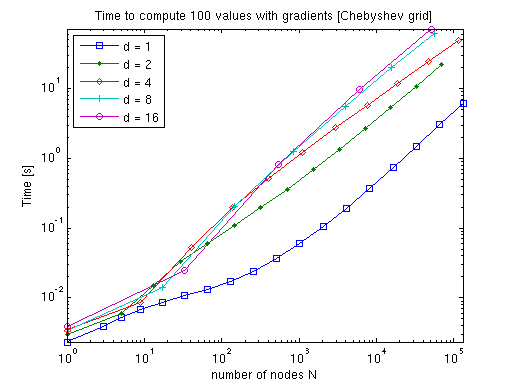
For comparison, numerical differentiation with a centred-difference formula would require \(2d + 1\) interpolant evaluations per gradient — the analytic approach is substantially cheaper for moderate to large \(d\).