 |
deltaFlow
|
|
deltaFlow
|
Declaration of the Newton-Raphson load flow solver for power system analysis. More...
#include <Eigen/Dense>#include <utility>#include <vector>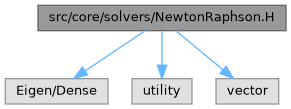
Go to the source code of this file.
Functions | |
| bool | NewtonRaphson (const Eigen::MatrixXd &G, const Eigen::MatrixXd &B, const Eigen::VectorXd &Ps, const Eigen::VectorXd &Qs, Eigen::VectorXd &V, Eigen::VectorXd &delta, int n_bus, int n_pq, const std::vector< int > &pq_bus_id, int maxIter=1024, double tolerance=1E-8, std::vector< std::pair< int, double > > *iterHistory=nullptr) |
| Solves the power flow equations using the Newton-Raphson iterative method. | |
Declaration of the Newton-Raphson load flow solver for power system analysis.
The Newton-Raphson method is a robust and widely-used iterative algorithm for solving the nonlinear power flow equations in electrical power systems.
It uses the bus admittance matrix $$Y_{bus}$$ and iteratively updates the bus voltages $$V$$ by solving the set of nonlinear equations:
$$\Delta x^{(k)} = -[J(x^{(k)})]^{-1} F(x^{(k)})$$
where:
The power injection equations at each bus are:
Active power (P):
$$P_i = \sum_{j=1}^{n} |V_i||V_j|(G_{ij}\cos(\theta_{ij}) + B_{ij}\sin(\theta_{ij}))$$
Reactive power (Q):
$$Q_i = \sum_{j=1}^{n} |V_i||V_j|(G_{ij}\sin(\theta_{ij}) - B_{ij}\cos(\theta_{ij}))$$
where:
The Jacobian matrix has the general block structure:
$$J = \begin{bmatrix} \frac{\partial P}{\partial \delta} & \frac{\partial P}{\partial |V|} \\ \frac{\partial Q}{\partial \delta} & \frac{\partial Q}{\partial |V|} \end{bmatrix}$$
with submatrices defined as follows:
$$J_1(kn) = \frac{\partial P_k}{\partial \delta_n} = \begin{cases} -V_k \sum_{n=1}^N V_n |Y_{kn}| \sin(\delta_k - \delta_n - \theta_{kn}) & \text{if } k = n \ V_k V_n |Y_{kn}| \sin(\delta_k - \delta_n - \theta_{kn}) & \text{if } k \ne n \end{cases}$$
$$J_2(kn) = \frac{\partial P_k}{\partial |V_n|} = \begin{cases} V_k |Y_{kk}| \cos(\theta_{kk}) + \sum_{n \ne k} V_n |Y_{kn}| \cos(\delta_k - \delta_n - \theta_{kn}) & \text{if } k = n \ V_k |Y_{kn}| \cos(\delta_k - \delta_n - \theta_{kn}) & \text{if } k \ne n \end{cases}$$
$$J_3(kn) = \frac{\partial Q_k}{\partial \delta_n} = \begin{cases} V_k \sum_{n=1}^N V_n |Y_{kn}| \cos(\delta_k - \delta_n - \theta_{kn}) & \text{if } k = n \ -V_k V_n |Y_{kn}| \cos(\delta_k - \delta_n - \theta_{kn}) & \text{if } k \ne n \end{cases}$$
$$J_4(kn) = \frac{\partial Q_k}{\partial |V_n|} = \begin{cases} -V_k |Y_{kk}| \sin(\theta_{kk}) + \sum_{n \ne k} V_n |Y_{kn}| \sin(\delta_k - \delta_n - \theta_{kn}) & \text{if } k = n \ V_k |Y_{kn}| \sin(\delta_k - \delta_n - \theta_{kn}) & \text{if } k \ne n \end{cases}$$
The process continues until all mismatches are within a specified tolerance or the maximum number of iterations is reached.
Definition in file NewtonRaphson.H.
| bool NewtonRaphson | ( | const Eigen::MatrixXd & | G, |
| const Eigen::MatrixXd & | B, | ||
| const Eigen::VectorXd & | Ps, | ||
| const Eigen::VectorXd & | Qs, | ||
| Eigen::VectorXd & | V, | ||
| Eigen::VectorXd & | delta, | ||
| int | n_bus, | ||
| int | n_pq, | ||
| const std::vector< int > & | pq_bus_id, | ||
| int | maxIter = 1024, |
||
| double | tolerance = 1E-8, |
||
| std::vector< std::pair< int, double > > * | iterHistory = nullptr |
||
| ) |
Solves the power flow equations using the Newton-Raphson iterative method.
This is a pure solver function that takes G, B matrices, scheduled power, initial voltage/angle guesses, and bus classification. It modifies V and delta in-place.
| G | Conductance matrix (real part of $$ Y_{bus} $$). |
| B | Susceptance matrix (imaginary part of $$ Y_{bus} $$). |
| Ps | Scheduled active power injections (Pg - Pl) [p.u.]. |
| Qs | Scheduled reactive power injections (Qg - Ql) [p.u.]. |
| V | (in/out) Voltage magnitudes [p.u.]. |
| delta | (in/out) Voltage angles [rad]. |
| n_bus | Total number of buses. |
| n_pq | Number of PQ buses. |
| pq_bus_id | 0-based indices of PQ buses. |
| maxIter | Maximum number of iterations (default: 1024). |
| tolerance | Convergence tolerance for power mismatches (default: $$ 1 \times 10^{-8} $$). |
| iterHistory | Optional pointer to store iteration number and error at each step. |
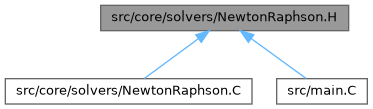
Definition at line 39 of file NewtonRaphson.C.
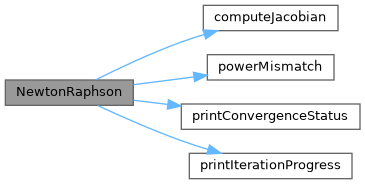
References computeJacobian(), LOG_DEBUG, LOG_WARN, powerMismatch(), printConvergenceStatus(), and printIterationProgress().