 |
deltaFlow
|
|
deltaFlow
|
Jacobian matrix computation for Newton-Raphson power flow analysis. More...
#include <Eigen/Dense>#include <vector>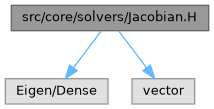
Go to the source code of this file.
Functions | |
| Eigen::MatrixXd | computeJacobian (const Eigen::VectorXd &V, const Eigen::VectorXd &delta, int n_bus, int n_pq, const std::vector< int > &pq_bus_id, const Eigen::MatrixXd &G, const Eigen::MatrixXd &B, const Eigen::VectorXd &P, const Eigen::VectorXd &Q) |
| Computes the Jacobian matrix for the Newton-Raphson power flow solver. | |
Jacobian matrix computation for Newton-Raphson power flow analysis.
Constructs the Jacobian matrix with block structure:
$$ J = \begin{bmatrix} J_{11} & J_{12} \ J_{21} & J_{22} \end{bmatrix} $$
where:
Follows the formulation by B. Sereeter, C. Vuik, and C. Witteveen (REPORT 17-07).
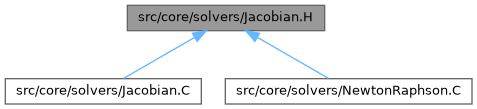
Definition in file Jacobian.H.
| Eigen::MatrixXd computeJacobian | ( | const Eigen::VectorXd & | V, |
| const Eigen::VectorXd & | delta, | ||
| int | n_bus, | ||
| int | n_pq, | ||
| const std::vector< int > & | pq_bus_id, | ||
| const Eigen::MatrixXd & | G, | ||
| const Eigen::MatrixXd & | B, | ||
| const Eigen::VectorXd & | P, | ||
| const Eigen::VectorXd & | Q | ||
| ) |
Computes the Jacobian matrix for the Newton-Raphson power flow solver.
| V | Voltage magnitudes at each bus [p.u.]. |
| delta | Voltage angles at each bus [rad]. |
| n_bus | Total number of buses. |
| n_pq | Number of PQ buses. |
| pq_bus_id | 0-based indices of PQ buses. |
| G | Conductance matrix (real part of $$ Y_{bus} $$). |
| B | Susceptance matrix (imaginary part of $$ Y_{bus} $$). |
| P | Computed active power at each bus (from power mismatch) [p.u.]. |
| Q | Computed reactive power at each bus (from power mismatch) [p.u.]. |
Definition at line 30 of file Jacobian.C.
